







汽车工程师:ACC 自适应巡航技术有什么优缺点?
0
巡航分为定速巡航和自适应巡航
定速巡航
顾名思义,定速巡航是汽车以一定的速度巡航,不需要驾驶员进行操作(踩油门),巡航需要一定的速度才能进入(这个可以标定,比如有些车车速大于50才能进入)。进入巡航会有一个初始速度(比如50kmh),且速度可以通过按钮进行调节(加,减,快加,快减),巡航的退出也有一系列的条件,比如踩刹车时就会退出巡航,汽车本身状态不合适(有部件出问题)也会退出巡航。
定速巡航相对来说比较简单(其实逻辑挺复杂),只是没有复杂的传感器,处理器等等。
定速巡航只适用于路况较好的情况下,比如高速,车少路况。
自适应巡航
自适应巡航(ACC)比较智能,且一般在较低的速度下即能进入巡航,除了高速路况,也能适用于城市路况,走走停停的路都可以。
汽车的传感器(雷达)会根据前车以及本车的行驶状态(车距和速度),经过ECU的计算判断后,向执行器(节气门,制动,档位)发送指令,以决定自己的行驶状态,是加速还是减速,还是退出巡航。
自适应巡航最基本功能是保持车辆纵向行驶,在有碰撞危险时,车辆会提示驾驶员并进行主动制动干预。
要说优点,显然,ACC在一定程度上减轻驾驶员驾驶的疲劳。
| ACC系统的组成
首先是传感器,目前有雷达(长距雷达),超声波测距传感器,红外测距传感器等等。
传感器相当于“眼睛”。对于眼睛来说,关键是要识别在本车道的前车,排除旁边车道车辆的影响。
眼睛接收到信号后,就传递给汽车大脑中的ACC 巡航控制系统,该系统会查询一系列规章制度,以决定汽车该怎么行驶,这些规章制度就是ACC中的控制策略。
安全车距模型(意思就是汽车跟前车保持多少距离合适)是ACC系统控制的主要控制策略之一;他不能过大,否则会导致你后头车辆的抗议;不能过小,否则有追尾风险;安全车距是最小停车距离与当前车速的函数。
PS:安全距离,其实并不是一个固定的长度单位,而是所谓的TTC,time to collsion,即假设保持当前相对速度,两车发生追尾所需要的时间。
在大脑告诉了汽车该怎么做之后,接下来就是执行机构的事了,执行机构相当于汽车的“手脚”。
执行机构包括节气门,制动,档位。通过这些机构的动作,对汽车进行操控。
说缺点还不如谈谈ACC的发展。
| ACC的发展
ACC,相比于其他的汽车电子控制技术,还略显不成熟。难点,在于对路况适应性。
自适应巡航作为一种驾驶辅助,毕竟不能做到像人一样的智能,能分辨所有的路况,且做出相应反应。目前ACC还主要用在路况较好的道路(高速或高架),而且是主车道目标车辆的判断。
而对于旁车道,以及多目标车辆的监测;有并线意图的车辆的预判,还做得不足。比如前车突然进入弯道,这时本车可能会认为安全距离过大,出现误判而突然加速进入弯道。
以下是一些典型路况的分析:
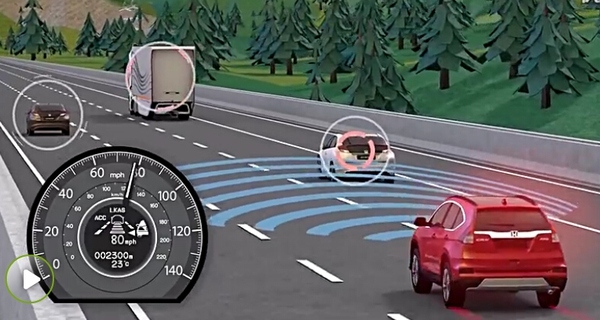
1、当前方没有车辆,ACC会以一定的速度巡航(巡航的车速在你设定的车速限值范围内);
2、当雷达监测范围内出现车辆时,如果车速过高,此时汽车会减速,并以一定的车速跟随前车行驶,保持安全距离;若前车又切出本车道,则本车会自动加速至设定车速。
如下图(视频截图)前方车道无车,此时车速是80km/h:
下图2,前方车道出现车辆,车速下降:
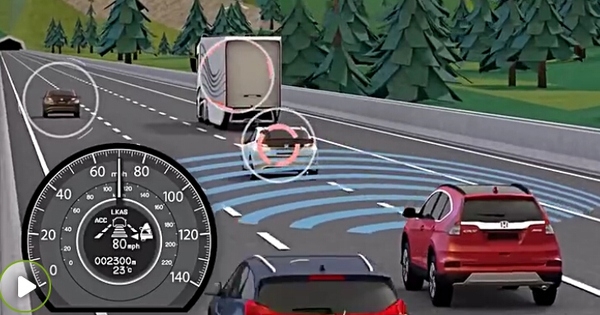
3、当前车变向时,汽车会更换跟车目标;
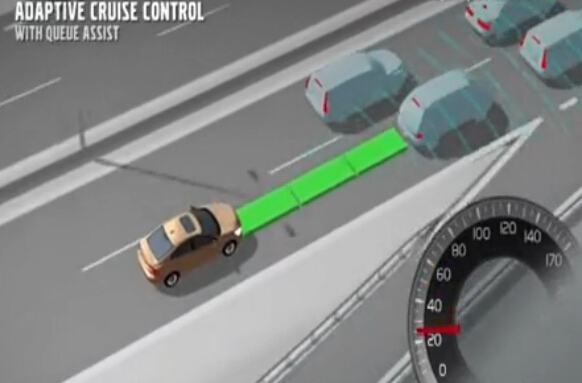
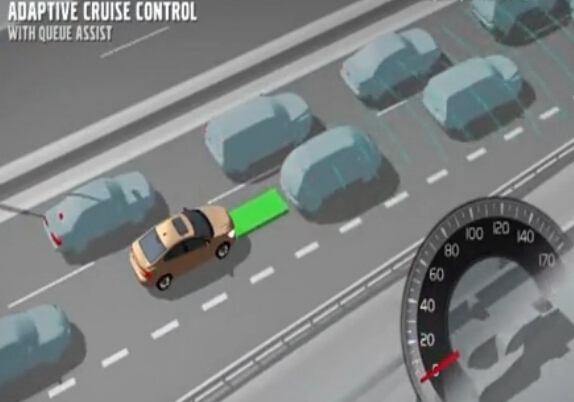
4、ACC停走功能(如果有),会在汽车低速,甚至静止也能启用,这点在走走停停的城市工况比较有用;
该系统在低速时仍能够保持与前车的距离,并能够对汽车制动,直至静止,在几秒后,如果前车起动,ACC也会自动跟随启动;
如果停留时间较长,只需驾驶员轻踩踏板则能够再次进入巡航模式。
PS: 要实现带停走功能的ACC,通常还需要摄像头的辅助,因为雷达识别目标的能力虽然强,但是受到杂波干扰非常厉害,还是需要摄像头的图像识别功能来确认目标。而Mobileye公司的产品甚至可以只用摄像头实现ACC,当然,阴天下雨下雪估计就废了。
同时,跟车到停车以后,绝大部分厂商的策略是必须由驾驶员确认之后才能再次起步,可以是按键确认,也可以是踩油门确认。
贴图举例:下图中为城市工况,此时车速25km/h:
如下图等红灯时,汽车能自动刹车,车速降为0,前车起动后,本车自动跟随起动:
5、在进入弯道时,汽车会根据弯道的情况而调整车速。长距雷达的视野较小,弯道半径过大可能会丢失目标,所以目前最高等级的ACC也仅对150m以上的弯道半径做性能要求。
总结: ACC作为智能驾驶技术,将会是未来汽车发展方向,就像无人驾驶一样,然而机器始终是机器,并不能完全代替人类,再智能的驾驶也只是辅助驾驶,不能完全依赖和信任。
各位老司机请清醒使用。
猜你喜欢
换一换-
-



-



-



-


-



 “十九大”胜利闭幕,金山云出色完成视
“十九大”胜利闭幕,金山云出色完成视10月24日上午,万众瞩目的党的”十九大”胜利闭幕,而在25日召开的十九届中央委员第一次全体会议上,新一界领导班子正式亮相,这标志着我国社会主...
 企业办公服务峰会11月2日召开,探讨企
企业办公服务峰会11月2日召开,探讨企首届聚焦企业办公服务对企业轻资产转型发展的推动、以及企业IT办公服务解决方案的企业办公服务峰会,将于11月2日在北京亚洲大酒店召开。峰会以“...
 俄罗斯世界杯赛程表 买足彩到互联网彩
俄罗斯世界杯赛程表 买足彩到互联网彩时光如水,岁月如歌。转眼还有不到一年的时间,四年一度的世界杯足球赛即将于2018月6月14日至7月15日在俄罗斯境内11座城市中的12座球场内举行。虽...
 iPhone X开售数量有限价格高 玩互联网
iPhone X开售数量有限价格高 玩互联网iPhone一直是全球知名品牌,该品牌手机最大特点就是每年更新换代快。近日根据来自供应链的可靠消息曝出,目前富士康已经提前发出了 iPhone X 的第...
 苹果独木难撑 金山云KSC265为直播业减
苹果独木难撑 金山云KSC265为直播业减可以说,苹果宣布旗下iOS11和Mac OS这两大操作系统支持H.265标准,是这家公司在高清视频生态中纵深布局的重要体现。尽管很多评论都认为,这将给视...
 韩国美女为手机游戏代言
韩国美女为手机游戏代言近日,韩国女艺人郑秀妍(Jessica)成为手机游戏《驯龙高手3D》的...
 ”一夜暴富”的网络女主播
”一夜暴富”的网络女主播这些 要明确的表达出性感。爱慕者会送她们虚拟的礼物,有的甚至...
 Apple Watch发布首日
Apple Watch发布首日盛况空前 Apple Watch发布首日 来到英国伦敦最知名的塞尔福里奇(...
 日本奇葩机器人
日本奇葩机器人超仿真美女机器人机器人女友不是梦 看过《我的机器人女友》的人...
-











